全自動垃圾抓斗起重機控制方案
1.抓斗吊設(shè)備/系統(tǒng)簡介
1.1設(shè)備在工藝過程中的任務(wù)
抓斗吊作業(yè)車間有一個16M*16M物料池,四個投料口,用于抓斗從物料池抓取物料按需投放各個投料口,由運輸車從外面運至并傾倒于物料池。
1.2電控設(shè)備的主要組成部分、工作原理
中控室內(nèi)設(shè)有1套上位機,可同時對2臺起重機進行監(jiān)控,并設(shè)1套聯(lián)動臺用于2臺(一臺用一臺備)起重機的調(diào)試與手動操縱。
起重機各機構(gòu)驅(qū)動使用西門子或ABB變頻器,并加裝防搖卡,根據(jù)工藝要求自動調(diào)整輸出頻率和電壓,實現(xiàn)全自動運行中的加減速與抓斗的搖擺控制。
起重機的控制采用西門子的觸摸屏和可編序控制器(PLC)進行手動調(diào)整操作和全自動程序控制。
物料池使用施克激光掃描儀來識別料位高度,并把信息轉(zhuǎn)送PLC控制抓斗移至高位抓取物料。投料口使用施克超聲波探測儀來判別抓斗應(yīng)投放位置。
運輸車作業(yè)通道由激光傳感器做安全防護。所有設(shè)備之間均以有線或無線以太網(wǎng)進行通訊,實現(xiàn)高速的數(shù)據(jù)傳送與監(jiān)控。
1.3控制系統(tǒng)安全防護的關(guān)鍵點
1、抓斗與運輸車的安全防護
2、物料池料位的探測
3、抓斗防傾,防搖,自動沉抓
4、大小車的定位準(zhǔn)確度
5、稱重裝置
6、兩臺起重機的防撞
2.1解決方案框圖
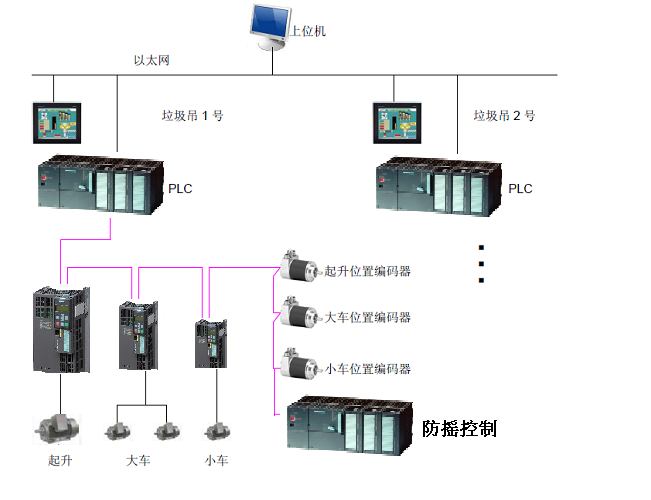
方案簡述
如上圖所示,起重機采用DP現(xiàn)場總線的通訊方式,由PLC、變頻器和絕對值編碼器構(gòu)成整個通訊系統(tǒng),同時每臺起重機有對應(yīng)的觸摸屏進行操作控制和狀態(tài)顯示。同時,中控室內(nèi)還設(shè)有1套上位機,可同時對2臺起重機進行監(jiān)控。上位機,觸摸屏以及PLC之間采用高速以太網(wǎng)進行通訊,實現(xiàn)高速的數(shù)據(jù)監(jiān)控。
2.2自動運行介紹
2.2.1抓斗與運輸車輛的安全防護介紹
1、設(shè)定抓斗從物料池運行至各個料口的運行軌跡,使之不應(yīng)與運輸車輛的作業(yè)通道相同與相交。(不得相同,盡量不應(yīng)交)
2、畫定運輸車輛的運行作業(yè)通道,使之不應(yīng)與抓斗的運行軌跡相同與相交。(不得相同,盡量不應(yīng)交)
3、畫定運輸車輛在物料池的6個傾卸物料點,由激光傳感器測定傾卸物料點是否有運輸車輛在作業(yè)。
4、如果抓斗運行軌跡與運輸車輛通道相交,則相交點設(shè)起重機位置傳感器與運輸車輛激光傳感器,并設(shè)運輸車輛通行紅綠燈。
當(dāng)起重機運行到相交點位置傳感器時,則運輸車輛通道紅燈亮,提醒運輸車輛司機注意避讓。
當(dāng)起重機運行需經(jīng)過相交時,如有運輸車輛在相交點,則激光傳感器控制天車暫停運行避讓車輛通過。
5、當(dāng)抓斗吊在物料池抓取物料時,激光傳感器控制天車避讓6個傾卸物料點的作業(yè)車輛。
2.2.2物料池料位的探測介紹
物料池料位的高度探測使用施克激光掃描儀測定*高位,并經(jīng)PLC控制抓斗在避開傾卸物料點的作業(yè)車輛從*高位抓取物料。
2.2.3自動控制原理和操作介紹:
起重機大車、小車、起升機構(gòu)均采用變頻驅(qū)動,對各機構(gòu)的運行位置數(shù)據(jù)采集均使用旋轉(zhuǎn)編碼器。
起升機構(gòu)的位置編碼器安裝與卷筒同軸,這樣可以比較直接的檢測抓斗的下放位置。
對于大車和小車,編碼器應(yīng)安裝在特定的檢測輪上并配有復(fù)位點以消除累積誤差。
可編程控制器(PLC)通過DP總線讀取編碼器的反饋信號以計算各機構(gòu)當(dāng)前的位置。計算出抓斗所處的實際位置,達到自動控制的目的。
具體工藝描述如下:
抓料:吊車張開的抓斗(無料狀態(tài))能在自動控制下運行到經(jīng)PLC給定的物料池料位的*高點,并下降到抓料的高度,閉合抓斗并下沉抓取物料,完成抓料過程。抓料不足時、抓料超重時在觸摸屏有重量顯示和超重報警。
投料:吊車閉合的抓斗(有料狀態(tài))下,由投料口超聲波測定應(yīng)投口,經(jīng)PLC控制按即定運行軌跡運行至指定投料口,并下降到投料的高度,自動稱重并記錄該斗物料的重量,開啟抓斗將物料投入到料斗中,自動完成投料過程。
稱重:抓斗起重機設(shè)有物料量計算機稱重系統(tǒng)。該系統(tǒng)傳感裝置配有無線傳輸器件,投料時自動稱重、去皮。信號自動傳輸?shù)絇LC并在觸摸屏上顯示。上位機完成計量、累計和打印報表等作業(yè)。
自動泊車:操作員點擊“泊車”按鈕,抓斗起重機張開的抓斗(無料狀態(tài))能自動提升至設(shè)定的高度,小車自動行走到設(shè)定的位置,大車自動行走到泊車位置,抓斗自動下降到設(shè)定的高度,自動完成泊車的全過程。
運行行程:在起重機大車運行(X軸)、小車運行(Y軸)、起升機構(gòu)(Z軸)的適當(dāng)位置裝設(shè)運行傳感器,使控制系統(tǒng)準(zhǔn)確了解起重機(抓斗)的空間位置,自動完成尋址工作。在特征點如投料口中心、控制室保護區(qū)等還設(shè)有行程保護開關(guān),在三維空間的標(biāo)準(zhǔn)點設(shè)地址傳感器,進行誤差校正。在區(qū)域的端點設(shè)有常規(guī)的行程限位開關(guān)等保護裝置。上述信息經(jīng)信號線路傳送到控制系統(tǒng)的運動指揮系統(tǒng)PLC中,使控制系統(tǒng)準(zhǔn)確了解起重機抓斗的空間位置,故障提示及排除辦法。
2.3系統(tǒng)監(jiān)控
2.3.1觸摸屏
單機觸摸屏選用西門子電氣TP1200系列的10.2”觸摸屏,該觸摸屏為65536真彩TFT,集成2路RS485協(xié)議接口和1路以太網(wǎng)接口,32M內(nèi)存,可用USB下載程序。
2.3.2上位機系統(tǒng)設(shè)計
上位機系統(tǒng)選用西門子電氣WINCC7.0系列SCADA解決方案。
WINCC7.0是一個完全集成的工業(yè)控制解決方案,通過提供可靠、靈活、高性能的監(jiān)控系統(tǒng),極大地提升了客戶的投資回報率。簡單易用的配置工具和強大的功能使您能夠針對各種規(guī)模的應(yīng)用進行快速開發(fā)并部署解決方案。WINCC7.0的特性,如全面的冗余、可擴展性、以及無與倫比的靈活性使其在競爭對手中脫穎而出。
WINCC7.0提供一個現(xiàn)成的、完整的系統(tǒng)軟件包,所有的功能都已經(jīng)內(nèi)置,它包含了各種驅(qū)動程序和各種擴展功能。這些功能緊密結(jié)合在一起,從而使系統(tǒng)具有更**的性能和可靠性。不同于其他的基于PC的工業(yè)控制系統(tǒng),WINCC7.0從設(shè)計之初就是為了滿足企業(yè)利用單一而完整的系統(tǒng)來進行各種規(guī)模、不同復(fù)雜度控制的需求,并保持系統(tǒng)的高性能和高可靠性。
在本方案中,如果僅用于起重機系統(tǒng)的監(jiān)控,則可使用下面的結(jié)構(gòu):

3功能特點
3.1高精度定位
大、小車行走至各工位能準(zhǔn)確定位和主鉤上升、下降位置是實現(xiàn)自動定位的關(guān)鍵所在,同時要求定位精度控制在±20mm以內(nèi)。從經(jīng)濟性和可靠性出發(fā),我們選用絕對值編碼器定位技術(shù)方案,每臺起重機的大車、小車和主鉤分別加裝絕對值編碼器,用于實時檢測兩機構(gòu)的位移量。絕對值編碼器*大的特點是:可以實時記憶當(dāng)前位置,即使在系統(tǒng)斷電的情況下也能準(zhǔn)確記錄當(dāng)前數(shù)據(jù)。有力保證了系統(tǒng)的可靠性。下面以大車定位說明,我們?nèi)绾螌崿F(xiàn)定位控制,保證±20mm精度要求。
我們選用8位256線編碼器,編碼器裝在大車隨動輪上,對中安裝。這樣,隨動輪每轉(zhuǎn)1周,絕碼器也跟隨轉(zhuǎn)1周,那么絕對值編碼器每個脈沖的分辨率為隨動輪周長的1/256。例如:假設(shè)隨動輪的周長1000mm,則分辨率:1000/256=3.9mm,接近4mm,因此大車的定位分辨率完全可以滿足±20mm的要求。
在定位控制上,我們采取的伺服控制的多點定位控制技術(shù),運行曲線見下圖:

大車行走在高速區(qū)時,實現(xiàn)快速加速,全速運行,通過編碼器的實時測量的數(shù)據(jù)分析可得出當(dāng)大車接近到達工位時,變頻器快速減速,以較低的速度進行滑行區(qū),以克服起重機慣性的影響。一般我們將滑行的速度控制在1-2Hz以內(nèi),假設(shè)大車速度在2m/min內(nèi);當(dāng)大車完全到達工位時,系統(tǒng)立即停止變頻器運行,抱閘動作,整個動作過程時間不足0.5秒鐘。在0.5秒內(nèi),我們可以計算出大車的理論*大位移量:2000/60*0.5mm=16mm,可以滿足±20mm的要求。實踐證明,通過經(jīng)驗豐富的工程師調(diào)試,定位精度可以進一步提高。
主鉤定位方式因與大車定位原理一樣,這里不再贅述。
3.2防搖技術(shù)
本系統(tǒng)的防搖技術(shù)采用電子防搖,電子防搖結(jié)構(gòu)簡單,成本低。采用ABB專用的防遙功能塊,使得編程簡單,圖形化編程,界面友好。系統(tǒng)的防搖功能可以選擇投入或切除。
大、小車行走時,大小車加速和減速過程中,防搖功能均起作用。
通過該功能,抓斗沒有明顯搖晃,擺幅次數(shù)少于2次,擺角小于1度。
3.3稱重技術(shù)
在上位機上主要是行車稱重數(shù)據(jù)的統(tǒng)計和統(tǒng)計。該系統(tǒng)可以生成班、日、月的報表,為防止數(shù)據(jù)溢出,在本系統(tǒng)的“稱重管理”界面上有2個清零按鈕,分別是“A車數(shù)據(jù)清零”,“B車數(shù)據(jù)清零”。該按鈕的操作需要有工程師權(quán)限方可清零。
本系統(tǒng)中有三個操作員權(quán)限,分別是Operator1,Operator2,Operator3。另外還有一個Engineer的工程師權(quán)限,當(dāng)?shù)顷懙氖遣僮鲉T權(quán)限時,該按鈕將被鎖定,點擊操作將不會觸發(fā)后臺的數(shù)據(jù)清零。
清零按鈕
稱重管理界面主要顯示了兩臺車一天的實時信息,分別是:A車,B車,兩車合計實時的重量值。
3.4稱重管理
在報表打印界面有報表顯示區(qū)域、查詢的日期時間選擇和查詢的區(qū)間選擇。在進入到該界面后系統(tǒng)會自動跟隨到當(dāng)日的日期,用戶也可以根據(jù)需要選擇以前的歷史日期,選擇好后點擊相應(yīng)的查詢區(qū)間會顯示當(dāng)時的日期和該區(qū)間內(nèi)的查詢數(shù)據(jù)。
查詢數(shù)據(jù)選擇
在報表的顯示區(qū)域顯示數(shù)據(jù)管理的相應(yīng)操作按鈕,查詢數(shù)據(jù)出來后用戶可以用以上的按鈕對數(shù)據(jù)進行相應(yīng)的操作。
Download和Upload進行數(shù)據(jù)的上傳和下載。
HideCols用來隱藏相應(yīng)的列,在打印時可根據(jù)實際需求隱藏相應(yīng)的列從而篩選出自己想要的打印數(shù)據(jù)。
Showall用來顯示所有的列。
Print用來打印查詢出的報表。
Seting報表做相關(guān)的設(shè)置。
Refresh用來對數(shù)據(jù)進行刷新。
“上”、“下”、“左”、“右”用來在報表上進行移位操作。
另外報表具備排序功能,用戶可以選擇相應(yīng)的列,以該列的數(shù)據(jù)為基礎(chǔ)正序和反序的排序。

報表查詢顯示
數(shù)據(jù)的備份,該數(shù)據(jù)存在Access數(shù)據(jù)庫中,為防止操作員誤刪,數(shù)據(jù)庫放在C盤的根目錄下,在系統(tǒng)運行一段時間后,用戶可以將該數(shù)據(jù)庫備份下來進行分析。也可以將D盤備份好的空數(shù)據(jù)庫復(fù)制到C盤根目錄下替換。
3.5限位及保護
在起重機上必要的限位和保護是行車正常工作的必要前提。
本臺起重機的保護有主鉤的上限位,下限位,大車的左停止和左減速,大車的右停止和右減速,小車的前停止和前減速,后停止和后減速。
由編碼器做出來的保護有主鉤的上減速限位,坑內(nèi)的前停止和前減速,坑內(nèi)的左停止和左減速和右停止和右減速。另外在由坑內(nèi)向坑外移動時會有一個主鉤的高度限制,防止抓斗未提到一定高度而越坑。
為應(yīng)對緊急情況的出現(xiàn),在聯(lián)動臺上有一個帶防護罩的急停按鈕和柜門上的急停按鈕,用來緊急切斷行車的總電源即總斷路器的分勵脫扣機構(gòu)(此急停為應(yīng)對緊急情況,平時停車切勿操作)。
為確保在行車上作業(yè)人員的安全,在大車,小車和聯(lián)動臺上各設(shè)有急停按鈕,即有人員上車維護時需通過以上按鈕給整臺車斷電。另外在大車的門上有兩個門限位,人員上車后如不關(guān)閉大車門,大車機構(gòu)將無法動作。
行車的主鉤和小車由變頻器提供相應(yīng)的保護,出現(xiàn)故障請查詢變頻器面板上的故障代碼。大車和油泵由熱繼電器進行保護,當(dāng)熱繼電器動作時請檢查該機構(gòu)的工作情況然后給熱繼電器復(fù)位。
3.6一般故障與處理
故 障 名 稱(代碼) | 發(fā) 生 故 障 原 因及處理方法 |
1 起重機無法送電合閘 | 檢查觸摸屏上是否有急停報警。 檢查主令開關(guān)是否位于零位。 檢查鑰匙開關(guān)是否接通。 檢查操作模式是否正確。
|
2 主鉤不會工作 | 是否觸碰到極限位置。 變頻器是否報故障。
|
3 主鉤沒有高速 | 是否觸碰到減速開關(guān)。
|
4 小車不會工作 | 是否觸碰小車限位。 小車變頻是否報故障。
|
5大車不會工作 | 是否觸碰大車限位。 大車變頻是否報故障。
|
6 抓斗不能動作 | 抓斗熱繼電器是否動作。 抓斗電纜卷筒上的電纜是否有松動。 抓斗油泵是否工作。
|
7 防搖效果不明顯 | 檢查主鉤的高度位置是否有明顯的偏差,若偏差較大請上升至上限位復(fù)位編碼器。 防搖激活的線路是否正常。
|
8 機構(gòu)的位置與觸摸屏上的位置有明顯的偏差 | 檢查該機構(gòu)的的復(fù)位限位是否工作正常。 檢查編碼器是否正常工作。
|
故障報警
該界面用來顯示行車上的故障信息,提示操作人員行車現(xiàn)在的狀態(tài)。主要的故障有:各個急停的動作,三項保護器,各機構(gòu)變頻器和編碼器的故障信息,鋼絲繩防跳的故障,抓斗電機和大車電機的故障,大小車防搖故障,防傾斜下限提示和各個機構(gòu)的編碼器數(shù)據(jù)偏差過大報警。
一般的故障報警后,操作員需先查看相應(yīng)設(shè)備的實際情況,并記錄相應(yīng)的故障信息和故障代碼為維護人員提供幫助,然后按故障復(fù)位鍵進行復(fù)位。如果復(fù)位不了,請通知相應(yīng)的維護人員進行處理。
在這里編碼器數(shù)據(jù)偏差過大時依據(jù)各機構(gòu)限位所在該坐標(biāo)的位置確定的,當(dāng)超出范圍時,請檢查相應(yīng)的編碼器復(fù)位限位是否工作正常。













