
變頻器,起重機成套控制系統,智能起重機成套控制系統,定位系統,防搖系統,能量回饋單元,制動單元,變頻控制柜,河南省宏基工控科技有限公司
描 述河南省宏基工控科技有限公司,銷售熱線:0373-8614122/8615178,是集研發、設計、制造、安裝、調試電氣控制系統、高低壓供配電系統、機電工程總包并提供相關技術咨詢與培訓的高新科技企業。
全國24小時銷售熱線:
0373-8614122/8615178
1.設備/系統簡介
本方案適用于智能垃圾抓斗起重機電氣系統,用于秸桿運輸車輛進入儲料棚卸料區域的卸料、對儲料棚內燃料的全方位垛料、向地下料斗的給料等。
起重機采用聯動控制臺加觸摸屏和可編程序控制器(PLC)進行手動與半自動操作。
1.1設備在工藝過程中的任務
1.1.1農業桔桿或林業廢棄物通過汽車運輸至儲料棚內,在卸料區域,由操作工操作抓斗起重機卸料。
1.1.2 由操作工觀察儲料棚內物料堆積狀況,并操作起重機全方位垛料。
1.1.3 由操作工觀察給料斗情況,并操作起重機向地下料斗給料
1.1.4 無卸料和垛料作業時,在自動投料狀態,自動檢測地下料斗給料點是否缺料,缺料時,起重機按設定路徑逐點循環自動抓料并向地下料斗投料。
1.1.5 無卸料和投料作業時,在自動垛料狀態,起重機按設定路徑逐點循環自動抓料并向設定垛料點逐點循環(倒)垛料。
1.1.6 在向地下料斗投料作業時,每次投料皆由稱重計量裝置自動計量并存儲數據。
1.1.7 抓斗起重機具備完善的故障自診斷功能。
1.2電控設備的主要組成部分、工作原理
起重機采用聯動控制臺加觸摸屏和可編程序控制器(PLC)進行手動與半自動操作和程序控制。各機構驅動使用變頻器,根據工藝要求自動調整輸出頻率和電壓,使各機構運行加速、減速斜率的調節,實現起重機的手動和半自動運行平穩控制。手動操作時在起重機控制室內能夠控制起重機移料、給料、倒料、堆料等所有動作;半自動操作時,在觸摸屏上選取所設定的抓料區域并選取所設定的投料地址,起重機在程序控制下,逐點循環自動運行到抓料位置,下降抓斗至抓取位,由傾角傳感器控制抓斗的傾斜角度不大于30度,抓取物料,提升到設定高度,自動運行至逐點循環選定的投料位置,開啟抓斗投放物料,實現起重機移料、給料、倒料、堆料等所有動作,自動完成投料過程。
起重機具有上述程序化操作(半自動控制)和手動操作轉換開關,起重機在手動控制方式下,采用聯動臺人工操作控制,控制起重機大車、小車、起升機構的電機變頻調速,并手工開啟抓斗,實現抓料和投料過程。
1.3控制系統的關鍵點
1、儲料棚區域的劃分
2、自動控制定位(定位方式的選擇)
3、防搖控制
4、抓斗防傾斜(不大于30度)
2.西門子電氣半自動控制系統解決方案
2.1解決方案框圖
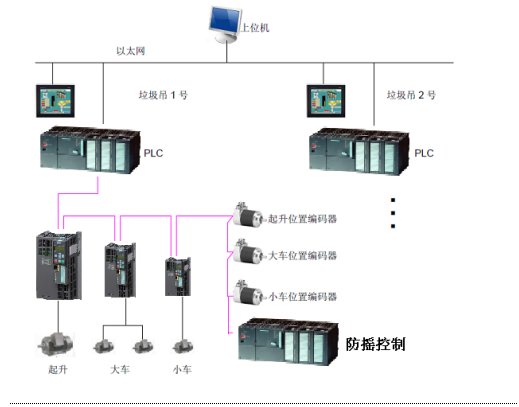
方案簡述
如上圖所示,起重機采用DP現場總線的通訊方式,由PLC、變頻器和絕對值編碼器構成整個通訊系統,同時起重機有對應的觸摸屏進行操作控制和狀態顯示。同時,操作室內還設有1套上位機,可對起重機進行監控。上位機,觸摸屏以及PLC之間采用高速以太網進行通訊,實現高速的數據監控。
2.2功能特點與自動控制過程
2.2.1手動控制操作介紹:
司機觀察通過聯動控制臺操縱起重機運行,完成大小車移動、抓斗升降開閉、抓取物料,投料等動作。
。
2.2.2高級半自動控制原理和操作介紹:
起重機大車、小車、起升機構均采用變頻驅動,對各機構的運行位置數據采集均使用旋轉編碼器。
起升機構的位置編碼器安裝與卷筒同軸,這樣可以比較直接的檢測抓斗的下放位置。
對于大車和小車,編碼器應安裝在特定的檢測輪上并配有復位點以消除累積誤差。
可編程控制器(PLC)通過DP總線讀取編碼器的反饋信號以計算各機構當前的位置。計算出抓斗所處的實際位置,達到自動控制的目的。
電動液壓抓斗上面安裝傾角傳感器,以防止抓斗嚴重傾斜。
半自動狀態下,各機構的動作均能采用程序化控制來實現。在司機室的操作臺上,采用觸摸屏操作。把加料斗和整個物料坑平面在觸摸屏屏幕上劃分為網格地址,司機通過觸摸屏選擇抓取和投放位置并輸入重復次,起重機自動從泊車位置啟動、移向抓取點,下降抓斗、到位及傾斜檢測、抓取垃圾,提升抓斗、移向加料口,稱重計量、投料、返回泊車位置或重復動作。投放的精度≦50mm,料斗定位精度為≦20mm。
本臺抓斗吊的半自動水平具體列表描述如下:
具體動作過程 | 高級半自動控制方式 | 備注 |
料位信號 | 人工觀察 | |
選擇投放點 | 人工觀察 | |
選擇抓取點 | 人工觀察 | |
起重機啟動 | 手動 | |
移向抓取點 | 自動 | |
抓斗下降 | 自動 | |
抓斗狀態檢測及糾正 | 自動 | |
抓取桔桿 | 自動 | |
提升抓斗 | 自動 | |
移向進料口 | 自動 | |
開啟抓斗,卸料 | 自動 | |
移向泊車位置 | 自動 | |
判斷物料狀態 | 人工觀察 | |
故障診斷 | 自動 |
具體工藝描述如下:
抓料:吊車張開的抓斗(無料狀態)能在手動控制下運行到指定的桔桿堆放區域,并下降到抓料的高度,閉合抓斗抓取桔桿,完成抓料過程。抓料不足時、抓料超重時在觸摸屏有重量顯示和超重報警。
投料:吊車閉合的抓斗(有料狀態)下,在聯動臺上或觸摸屏上選擇半自動控制方式,并在觸摸屏上指定投料口,抓斗自動提升運行到指定的地下料斗,并下降到投料的高度,自動稱重并記錄該斗物料的重量,開啟抓斗將桔桿投入到料斗中,自動完成投料過程。
搬運與倒垛:抓斗起重機在手動控制下,到達桔桿搬運與倒垛的位置,抓取桔桿并將桔桿投放到桔桿儲料棚內某位置(或區域)堆放;不計量。
稱重:抓斗起重機設有桔桿量計算機稱重系統。該系統傳感裝置配有無線傳輸器件,投料時自動稱重、去皮。信號自動傳輸到PLC并在觸摸屏上顯示。上位機完成計量、累計和打印報表等作業。
自動泊車:操作員點擊“泊車”按鈕,桔桿抓斗起重機張開的抓斗(無料狀態)能自動提升至設定的高度,小車自動行走到設定的位置,大車自動行走到泊車位置,抓斗自動下降到設定的高度,自動完成泊車的全過程。
儲料棚網格地址劃分:起重機大車運行(X軸)、小車運行(Y軸)、起升機構(Z軸)上各裝一個絕對值編碼器,編碼器則發出的數字信號給可編程控制器(PLC),PLC根據編碼器的反饋信號進行高速計數,計算出起重機和抓斗所處的實際位置,各傳動機構通過DP控制進行位置點對點控制,達到自動控制的目的。
運行行程:在起重機大車運行(X軸)、小車運行(Y軸)、起升機構(Z軸)的適當位置裝設運行傳感器,使控制系統準確了解起重機(抓斗)的空間位置,自動完成尋址工作。在特征點如投料口中心、卸料保護區等還設有行程保護開關,在三維空間的標準點設地址傳感器,進行誤差校正。在區域的端點設有常規的行程限位開關等保護裝置。上述信息經信號線路傳送到控制系統的運動指揮系統PLC中,使控制系統準確了解起重機抓斗的空間位置,故障提示及排除辦法。
2.2.4 半自動實現:
防搖控制:要實現半自動或自動控制,防搖功能的實現是*基本的要求,西門子電氣將防搖控制功能集成在SIMOTION C PLC,大大降低了主PLC的運算負荷,加快了系統控制的實時性。
位置控制:如上安裝于變頻器上的控制單元CU320和CU240卡也可以進行絕對位置和相對位置控制。當前位置值由PLC通過DP送給控制單元。變頻器的輸出由PLC來控制,以到達目標位置。
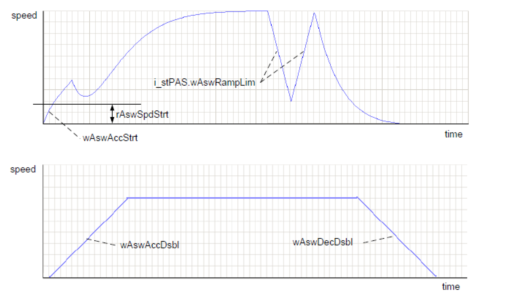
防搖加減速斜坡圖對照:
2.3系統監控
2.3.1觸摸屏
單機觸摸屏選用西門子電氣TP1200系列的10.2”觸摸屏,該觸摸屏為65536真彩TFT,集成2路RS485協議接口和1路以太網接口,32M內存,可用USB下載程序。
3功能特點
3.1 高精度定位
大、小車行走至各工位能準確定位和主鉤上升、下降位置是實現自動定位的關鍵所在,同時要求定位精度控制在±20mm以內。從經濟性和可靠性出發,我們選用絕對值編碼器定位技術方案,每臺起重機的大車、小車和主鉤分別加裝絕對值編碼器,用于實時檢測兩機構的位移量。絕對值編碼器*大的特點是:可以實時記憶當前位置,即使在系統斷電的情況下也能準確記錄當前數據。有力保證了系統的可靠性。下面以大車定位說明,我們如何實現定位控制,保證±20mm精度要求。
我們選用8位256線編碼器,編碼器裝在大車隨動輪上,對中安裝。這樣,隨動輪每轉1周,絕碼器也跟隨轉1周,那么絕對值編碼器每個脈沖的分辨率為隨動輪周長的1/256。例如:假設隨動輪的周長1000mm,則分辨率: 1000/256=3.9mm,接近4mm,因此大車的定位分辨率完全可以滿足±20mm的要求。
在定位控制上,我們采取的伺服控制的多點定位控制技術,運行曲線見下圖:
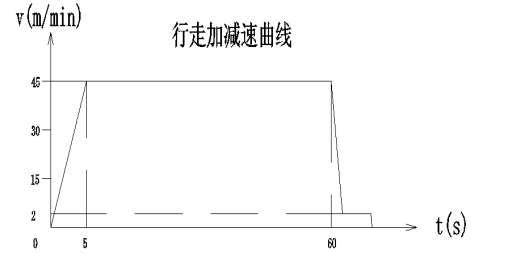
大車行走在高速區時,實現快速加速,全速運行,通過編碼器的實時測量的數據分析可得出當大車接近到達工位時,變頻器快速減速,以較低的速度進行滑行區,以克服起重機慣性的影響。一般我們將滑行的速度控制在1-2Hz以內,假設大車速度在2m/min內;當大車完全到達工位時,系統立即停止變頻器運行,抱閘動作,整個動作過程時間不足0.5秒鐘。在0.5秒內,我們可以計算出大車的理論*大位移量:2000/60*0.5mm=16mm,可以滿足±20mm的要求。實踐證明,通過經驗豐富的工程師調試,定位精度可以進一步提高。
主鉤定位方式因與大車定位原理一樣,這里不再贅述。
3.2 防搖技術
本系統的防搖技術采用電子防搖,電子防搖結構簡單,成本低。采用西門子專用的SIMOTIONC 運動控制器,內裝防遙功能塊,使得編程簡單,SCOUNT4.3編程平臺,圖形化編程 ,界面友好。系統的防搖功能可以選擇投入或切除。
大、小車行走時,大小車加速和減速過程中,防搖功能均起作用。速度動作曲線按下圖:
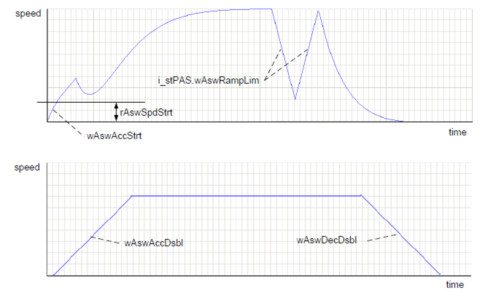
通過該功能,抓斗沒有明顯搖晃,擺幅次數少于2次,擺角小于1度。
3.3 稱重技術
在上位機上主要是行車稱重數據的統計和統計。該系統可以生成班、日、月的報表,另一方面該系統會將總累計傳送至焚燒爐設備的DCS系統中,為防止數據溢出,在本系統的“稱重管理”界面上有四個清零按鈕,分別是“A車破碎數據清零”,“A車焚燒數據清零”,“B車破碎數據清零”和“B車焚燒數據清零”。該按鈕的操作需要有工程師權限方可清零。
本系統中有三個操作員權限,分別是Operator1,Operator2,Operator3。另外還有一個Engineer的工程師權限,當登陸的是操作員權限時,該按鈕將被鎖定,點擊操作將不會觸發后臺的數據清零。
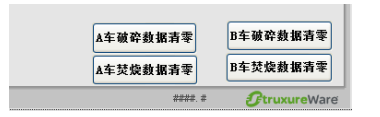
清零按鈕
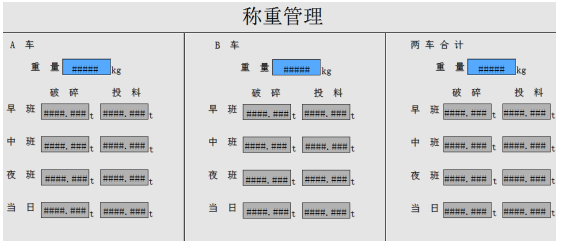
稱重管理界面主要顯示了兩臺車一天的實時信息,分別是:A車,B車,兩車合計。在每個分項下顯示的是:
實時的重量值。
早班的破碎和投料的累計值。
中班的破碎和投料的累計值。
夜班的破碎和投料的累計值。
當日的破碎和投料的累計值。
以上各個數據會在早上8點進行一次數據清零,開始新一天的累計。
3.4稱重管理
在報表打印界面有報表顯示區域、查詢的日期時間選擇和查詢的區間選擇。在進入到該界面后系統會自動跟隨到當日的日期,用戶也可以根據需要選擇以前的歷史日期,選擇好后點擊相應的查詢區間會顯示當時的日期和該區間內的查詢數據。
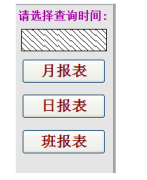
查詢數據選擇
在報表的顯示區域顯示數據管理的相應操作按鈕,查詢數據出來后用戶可以用以上的按鈕對數據進行相應的操作。
Download和Upload進行數據的上傳和下載。
Hide Cols用來隱藏相應的列,在打印時可根據實際需求隱藏相應的列從而篩選出自己想要的打印數據。
Show all用來顯示所有的列。
Print用來打印查詢出的報表。
Seting報表做相關的設置。
Refresh用來對數據進行刷新。
“上”、“下”、“左”、“右”用來在報表上進行移位操作。
另外報表具備排序功能,用戶可以選擇相應的列,以該列的數據為基礎正序和反序的排序。

報表查詢顯示
數據的備份,該數據存在Access數據庫中,為防止操作員誤刪,數據庫放在C盤的根目錄下,在系統運行一段時間后,用戶可以將該數據庫備份下來進行分析。也可以將D盤備份好的空數據庫復制到C盤根目錄下替換。
3.5限位及保護
在起重機上必要的限位和保護是行車正常工作的必要前提。
本臺起重機的保護有主鉤的上限位,下限位,大車的左停止和左減速,大車的右停止和右減速,小車的前停止和前減速,后停止和后減速。
由編碼器做出來的保護有主鉤的上減速限位,坑內的前停止和前減速,坑內的左停止和左減速和右停止和右減速。另外在由坑內向坑外移動時會有一個主鉤的高度限制,防止抓斗未提到一定高度而越坑。
為應對緊急情況的出現,在聯動臺上有一個帶防護罩的急停按鈕和柜門上的急停按鈕,用來緊急切斷行車的總電源即總斷路器的分勵脫扣機構(此急停為應對緊急情況,平時停車切勿操作)。
為確保在行車上作業人員的安全,在大車,小車和聯動臺上各設有急停按鈕,即有人員上車維護時需通過以上按鈕給整臺車斷電。另外在大車的門上有兩個門限位,人員上車后如不關閉大車門,大車機構將無法動作。
行車的主鉤和小車由變頻器提供相應的保護,出現故障請查詢變頻器面板上的故障代碼。大車和油泵由熱繼電器進行保護,當熱繼電器動作時請檢查該機構的工作情況然后給熱繼電器復位。
故 障 名 稱(代碼) | 發 生 故 障 原 因及處理方法 |
1 起重機無法送電合閘 | 1、 檢查觸摸屏上是否有急停報警。 2、 檢查主令開關是否位于零位。 3、 檢查鑰匙開關是否接通。 4、 檢查操作模式是否正確。 |
2 主鉤不會工作 | 1、 是否觸碰到極限位置。 2、 變頻器是否報故障。 |
3 主鉤沒有高速 | 1、 是否觸碰到減速開關。 |
4 小車不會工作 | 1、 是否觸碰小車限位。 2、 小車變頻是否報故障。 |
5大車不會工作 | 1、 是否觸碰大車限位。 2、 大車變頻是否報故障。 |
6 抓斗不能動作 | 1、 抓斗熱繼電器是否動作。 2、 抓斗電纜卷筒上的電纜是否有松動。 3、 抓斗油泵是否工作。 |
7 防搖效果不明顯 | 1、 檢查主鉤的高度位置是否有明顯的偏差,若偏差較大請上升至上限位復位編碼器。 2、 防搖激活的線路是否正常。 |
8 機構的位置與觸摸屏上的位置有明顯的偏差 | 1、 檢查該機構的的復位限位是否工作正常。 2、 檢查編碼器是否正常工作。 |
故障報警
該界面用來顯示行車上的故障信息,提示操作人員行車現在的狀態。主要的故障有:各個急停的動作,三項保護器,各機構變頻器和編碼器的故障信息,鋼絲繩防跳的故障,抓斗電機和大車電機的故障,大小車防搖故障,防傾斜下限提示和各個機構的編碼器數據偏差過大報警。
一般的故障報警后,操作員需先查看相應設備的實際情況,并記錄相應的故障信息和故障代碼為維護人員提供幫助,然后按故障復位鍵進行復位。如果復位不了,請通知相應的維護人員進行處理。
在這里編碼器數據偏差過大時依據各機構限位所在該坐標的位置確定的,當超出范圍時,請檢查相應的編碼器復位限位是否工作正常。
4硬件配置說明
<td width="39" valign="center" style="padding: 0px 7px; border-left-width: 1px; border-left-color: windowtext; border-right-width: 1px; border-right-color: windowtext; border-top: none; border-bottom-width: 1px; border-b
18桔桿吊 | |||||
序號 | 名稱 | 規格型號(柜號) | 單位 | 數量 | 生產廠商 |
1 | 1、電源和PLC柜 | ||||
2 | 柜體 | 2200X1000X600仿威圖(尺寸供參考) | 面 | 1 | 威圖 |
3 | 總斷路器 | 3VL630N630 TMA F/3P+相間隔板+MX_AC220+DH+(2HS+1AS) | 套 | 1 | 西門子 |
4 | 接觸器 | 3RT50666AP36 | 只 | 2 | 西門子 |
5 | 相序控制器 | 3UG4513-1BR20 | 只 | 1 | 西門子 |
6 | 電液抓斗電源斷路器 | 3VL160N125 TMA F/3P+相間隔板+2HS | 套 | 1 | 西門子 |
7 | 抓斗接觸器 | 3RT50461AN20+3RH59211EA11 | 臺 | 1 | 西門子 |
8 | 抓斗保護熱繼 | 3RU51464KB1 | 臺 | 1 | 西門子 |
9 | 斷路器 | 5SY62207CC | 只 | 2 | 西門子 |
10 | 斷路器 | 5SY62107CC | 只 | 2 | 西門子</p |
宏基公司始終堅持“一切為了用戶,快捷、**地提供**服務,滿足客戶要求”的服務宗旨,為用戶提供*好產品的同時,還為用戶提供*為**的售前、售中、售后服務:
售前:一站式售前服務
售中:安裝調試準確到位,用戶培訓全面具體。
售后服務一個宗旨、三個承諾
一個宗旨:不計成本地以*快的方式到達現場,解決問題。
三個承諾:
■點對點服務:凡是宏基電氣提供的產品,公司將為其提供*直接、*快捷的售后服務,減少中間環節,為用戶節省寶貴時間。
■3小時回復制:對用戶反映的任何問題,承諾在3小時內給用戶一個明確的回復,告知用戶我們具體的解決方案。
■24小時開通售后服務專線:0373-8614122(24小時售后服務電話)
服務承諾:
■公司對產品實行**服務,質保期內免費維修。
■安裝調試和質保期內免費為顧客提供各項服務及知識培訓。
■質保期過后本公司仍然對產品質量負責,在顧客有需求時為顧客提供有償服務,并保證提供合格的配件
溫馨提醒:為了能及時和您取得聯系,請您務必完整填寫您的聯系方式和需求信息,您可以輸入您的需求,如原料的類型,容量,進料尺寸,最終產品的尺寸等;你也可以通過商務通聯系我們的24小時在線客服。


















